


文 | 极智GeeTech
80%的数据+20%的模子=更好的AI。
这是东说念主工智能边界泰斗学者、斯坦福大学筹商机科学教师吴恩达(Andrew Ng)在他45岁寿辰今日忽视的东说念主工智能“二八定律”。他暗示,“若是咱们80%的使命是数据准备,那么确保数据质地是东说念主工智能团队的迫切使命。”
由此延长至端到端智能驾驶边界,智驾这盘菜看起来诱东说念主,但车企念念要吃到嘴里并莫得那么容易,这既要罕有据看成原料食材,也要有算力燃料把火烧得旺,还要合作算法的烹饪。优质的数据和充足的算力是一切期间迭代升级的先决要求,莫得好的食材和火候,再先进的算法也无法阐扬出最大服从。
当智驾迎来最为要道的中场战事,行业的要点不再是招募更多顶级的工程东说念主才,而切换到模子联想、器用链开发以及模子的测闇练证上。一个相配显然的感奋是,业界也曾以团队限度看成描述先进性的一项预见,而到了2024下半年,行业比拼的要道预见变成了云霄算力和数据质地。
从2023年的开城大战,到2024年的“车位到车位”大战,这其中若何酿成数据闭环成?若何建好算力“蓄池塘”?若何最大化利用数据和算力资源并完好意思最优算法?皆是车企决胜智驾下半场必须要责罚的问题。
“冰山之下”的数据闭环才略
端到端下的智能驾驶期间,是数据和算力的同谋。
跟着智驾系统中感知定位、决策计议和限度模块的完好意思方法由基于端正的代码向AI模子转变,智驾系统开发范式也从端正驱动渐渐过渡到了数据驱动,当系统越来越依赖数据驱动,意味着数据闭环对智驾系统越来越要道了。
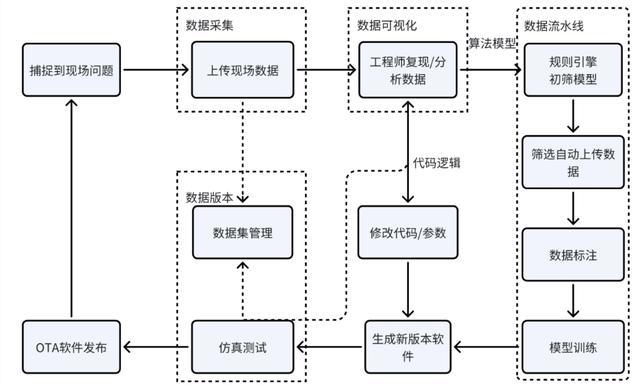
所谓数据闭环,是从数据采集、存储、挖掘、标注到模子闇练、仿真考证、集成部署的所有这个词开发使命流。数据闭环完成的是对数据价值的提真金不怕火使命,其骨子是将消散在一个又一个驾驶数据片断中的东说念主类驾驶学问安祥地迁徙到智驾系统模子的参数文献里,从而使智驾系统的发达愈加趋向拟东说念主化,大幅进步驾驶体验的当然性和清闲地。
从数据闭环发展阶段看,在第一阶段,智能驾驶期间主要采选硬件驱动的方法进行研发,数据闭环见解初现。参加第二阶段,算法和软件的迫切性按捺进步,智能驾驶运行尝试弃取小模子、基于端正驱动的措施来责罚智能驾驶问题。跟着智驾期间的进步,智驾系统关于数据的需求剧增,其优化对数据闭环的要求越来越高,因此数据闭环已渐渐参加由数据驱动的第三阶段。
关于端到端智驾系统所需要的数据,特斯拉曾给出过一些判断表率:一个端到端自动驾驶闇练至少需要100万个、散布万般、高质地的视频片断才略宽泛使命。若是片断达到1000万个,系统才略会变得难以置信。
理念念暗示,最晚本年齿首,会推出概况跨越1000万个片断闇练出来的端到端+VLM。前段时间小鹏智驾留心东说念主也公开暗示,小鹏端到端模子的闇练数据量已达到2000万个片断。
刻下,车企和智驾企业获取数据主要有两种方法:
一是从量产车上挖掘。比如针对车企卖出的几十万台车,工程师会写下非凡端正,若是用户的驾驶行为安妥要求,特定数据(经过脱敏处理)会被上传。车企用户也不错主动上传一些超过案例。
二是在存量数据中挖掘数据。在早期智驾还不闇练的阶段,车企和智驾企业经常累积大批数据,许多皆是无效数据,工程师只可通过一些算法例矩来挖取。
高质地数据看成养料,会决定智驾系统迭代的质地,也执续考验着车企的智驾自动化闭环才略。
最近几年,跟着量产车的限度化落地,许多车企皆运行转向弃取量产车的影子模式采集数据,但这种模式依然面对艰巨的挑战。
最初,是采集计谋问题,即若何均衡数据的长尾问题(灵验性)和数据的限度问题(老本)。若是采集计谋相比宽松,经常采集牵记的数据大部分是垃圾数据,根底莫得使用价值;若是采集计谋过于严格,又牵记丢失大批有价值的数据。
其次,是数据质地问题,若何界说数据质地是个艰巨的居品问题,“坏数据”(不熟练的驾驶、厄运的驾驶风尚、违背交通端正等)会向下拖曳大模子的闇练驱散。因此,若何精确地挑选出高质地的数据又是一个复杂的期间问题。
第三,是数据散布问题,若何从海量的视频片断中提真金不怕火灵验的特征、若何统计数据的散布、应该议论哪些维度,皆需要大批的使命。
关于大部分车企和智驾企业,还会面对严重的数据泛化问题,因为不同的车型传感器成立各异巨大,采集的数据经常难以复用,而国内车企普遍车型稠密,终末很可能是采了一堆数据放在那没法使用,看起来是数据钞票,其实皆是存储老本。绝不夸张地说,数据会占据端到端智驾系统开发中80%以上的研发老本。
因此,越早酿成数据闭环才略,就越有助于车企构筑既宽且深的期间与居品护城河,也就越有契机将竞争者拒之门外。
“算力武备竞赛”愈演愈烈
由AI大模子催生的抢购算力潮,从昨年运行突然迁徙到了汽车行业。以理念念、华为和小鹏汽车为首的新势力车企和智驾企业尤为激进。
和AI大模子期间趋同,端到端的智驾期间,雷同罕有十亿参数,也在向百亿级进发。对算力资源的拼抢成为智驾边界继数据之后又一个新的制胜司法。
践诺上,智驾的算力武备竞赛早已愈演愈烈。一方面,跟着智驾系统的迭代升级,智能汽车所搭载的传感器数目与类型进一步增多,智驾系统需要实时采集海量传感器数据并进行会通处理,作念出合理决策与旅途计议,将决策实时传送到践诺部件。在海量数据处理以及超低时延的需求之下,智驾系统筹商量激增,算力需求呈现指数级增长。
一般合计,自动驾驶等第每增多一级,所需要的芯片算力就会呈现十倍的上升。凭证Intel的推算,L5级别的全自动驾驶期间,每秒需要芯片处理的数据大要为4000G。

另一方面,智能座舱与智能车联的发展也对算力忽视了新的要求。座舱交互体验的升级与第三糊口空间趋势之下,“表露屏”渐渐替代车内其它表露方法,车载文娱与做事进一步丰富,多模态交互成为趋势。这些皆对整车算力忽视了更高的要求。
昨年7月,理念念汽车云霄算力为2.4 EFLOPS,礼貌11月算力已达6.83 EFLOPS。小鹏汽车筹商到2025年,云霄算力将从面前的2.51 EFLOPS增多到10 EFLOPS。华为智驾也在两个月内迅速将云霄算力限度从5 EFLOPS膨胀到7.5 EFLOPS。
刻下汽车算力主要开端仍是车载筹商平台,车载算力上限决定了异日汽车能够承载的软件做事升级上限,进而决定汽车全人命周期价值。因此,在软件期间仍处于执续升级迭代确当下,主机厂通过硬件堆砌,预埋鼓胀大的算力,以期在异日能更猛进程地获取软件做事收入。
但在摩尔定律之下,车载筹商平台的算力终有上限,而汽车的商品属性也无法承受不计老本的硬件堆砌。对数据的实时刻析处理吞吃着赶快高潮的算力数值,这一场算力武备竞赛也渐渐演变为比拼算力数值大小的盲目竞争,激发主机厂的算力惊悸。
为了缓解算力供给病笃,云霄大模子成为可行的有筹商。
从面前行业主流的三种端到端期间发展道路看,一种是通过大批端正和小模子堆叠而成的“大模子”,其需要大批的优秀端正工程师;一种是“车端大模子”,即顺利将端到端模子部署于车辆上,外汇配资诚然收效快,但受限于车端算力,且跟着后期闇练数据量的增多,容易堕入瓶颈;第三种等于云霄大模子(Foundation Model),其参数目是车端模子的几十倍以致数百倍,这是单纯的车端大模子所弗成企及的。
但闇练一个云霄大模子,也对大限度高性能算力以及数据存储和处理忽视了相配高的要求。
第一,是提高并行闇练性能和利用率的要求,这对云基础设施包括相聚互联、带宽,以及系统软件优化等带来了挑战。
第二,是对模子闇练执久厚实性的要求,比如模子闇练中断,闇练出现问题后能否快速拉起任务,诽谤故障时间。
第三,大限度多模态数据的存储与处理才略,完好意思并行闇练的高性能、高浑沌,餍足模子闇练按捺进步的数据量增长需求。
第四,海量数据的存储老本要求,在餍够数据处感性能要求的前提下,通过支执数据分层存储,完好意思最优的老本。
从整车角度上,当车端架构和云霄架构进一步长入后,接下来的竞争是数据挖掘、数据的灵验利用以及所有这个词期间栈对数据的聚拢,以及如安在大限度的基础设施上均衡所有这个词筹商效率。
换句话说,就是需要得回高质地、大限度的数据,再合作高算力,来闇练和迭代算法才略,成立“冰山之下”车端和云霄之间的数据闭环才略,来让这“三大件”的才略更灵验率和更低老腹地运转起来。
若何为智驾“降本增效”?
智能网联汽车的底色,是汽车的AI化。无论是智能驾驶、智能座舱,又或者是车路云一体化,皆在向着东说念主工智能的方针进化。深度学习、大模子等期间,亦深度镶嵌功能开发经由中。
关于智能汽车而言,智驾水平的上下体面前对环境的实时感知和对数据的分析处理才略方面,而这又需要开阔且优质的数据集和充足的算力作搭救。在资源有限的情况下,集通讯、感知、筹商于一体的车路云相聚有望为智驾的降本增效提供新路子。
通过车路云相聚,不错成立一个横跨车端、路侧和云霄的体系化闭环,路侧收罗的数据上传到云霄,在云霄汇集并对这些数据进行标注处理和用于算法闇练。完成后,云霄再把闇练好的算法模子数据发到车端,进行OTA部署及更新。
同期,路侧数据不错弥补车端的自然局限(视野盲区、超视距感知才略不及、顶点天气感知精度着落等),丰富车端的全局数据,从而进一步进步智驾才略和安全性。三端数据进行协同互补,推进完成了智驾期间的迭代与进化。
交通行业是个复杂系统,东说念主工智能在其中面前只呈现碎屑化应用,比如识别信号灯、识别违法等,念念要着实责罚问题,需要用大模子这根线把车流、说念路、交通讯号等所有的散点串联起来,酿成更高维度的全局智能,通过对车、路、云等交通要道节点开展智能协同,酿成对交通态势的全面、实时、精确的感知、限度与决策。
引入多模态大模子后,车路云相聚不错进步视觉分析的精确度、泛化才略和场景适合性,小模子算法面对的问题不错通过多模态大模子进行优化。同期,议论老本及带宽等问题,多模态大模子应用也需要有前端小模子来作念相应搭救,大小模子协同应用其实是多级协同筹商,多级协同筹商可能是异日发展的主要应用点。
前端小模子进行实时检测,快速分析,后端大模子进行深度推理、二次判断,减少误报,终末通过东说念主类反应强化学习的措施竣巧妙个算法模子的优化进步,这其中,勾通了小模子筹商快、老本低上风的同期,足下了大模子预计准确、措施才略强的优点。
车路云一体化场景中,云筹商聚焦非实时、长周期数据的大数据分析,能够为业务决策搭救提供依据,完好意思新应用做事开发的快速、纯真部署,并为整车OTA数据进行存储、筹商和分析,照看和简化车端电子开导与软件的复杂性。
旯旮筹商则聚焦实时、短周期数据的分析,能更好地搭救车端实时智能化处理与践诺。车路云相聚不错在路侧足下旯旮小模子进行快速感知,在旯旮云霄足下大模子推理进行二次预警,在中心云霄足下行业大模子进行优化,举座利用多级协同筹商来完好意思事件感知的准确。
在交通流预计方面,业界基本使用时序数据进行预计,包括实时监测、短时预计、弥远预计等。但交通流预计是一个复杂任务:交通流构成复杂、交通流参数之间并非通俗的线性关连,会受到外部要素比如天气、特殊事件等要素的侵略,交通系统存在动态性和不慑服性;同期也需要议论交通数据的质地和可用性问题。将数据预计勾通交通环境的实时数字孪生,不错为路网管控决策提供量化搭救。
在车路云相聚下,车、说念路、交通路口可能皆是智能体,智能体发展最迫切的是要进行东说念主机协同,也就是说由东说念主来设立方针,智能体再将方针拆分红不同门径,让智能体来决定每个门径使用大模子照旧小模子,终末酿成齐备的闭环链条,保险智能体的运行。
此前交通事件处置有许多预案,大部分很难定量和定性,比如无法准确知说念拥挤成因和进程,也就是说以前的预案很是于学问库,在每个门径上不同的东说念主的聚拢不同,处理方法也就不一样。通过智能体的应用将预案学问库转向智能体模式,不错愈加纯果然完成门径分发和退换,从而酿成对交通事件的准确分析和聚拢,便于交通照看部门完好意思更雅致化的交通照看。
智驾期间的演进,好似从冷刀兵期间到热刀兵期间,不同期间阶段具有显然的代际各异。夙昔的扶持驾驶依靠有限的端正、单一的功能依然有顺利的但愿,但到了端到端智驾期间,需要的是更大算力和更多数据,以及让算力和数据流转起来的机制和工程才略,任何一环的缺失皆会给这场竞赛带来变数。
到面前为止,坚执单车智能道路的车企照旧占大多数,但车路云一体化的后劲已弗成忽视。究竟是各自愿展,照旧最终走向会通,面前仍莫得长入的谜底。然则,群众皆无法侧目的是,智驾对降本增效的需求越来越高,数据和算力供给不仅要多,也更要精,生机靠堆卡、堆数据就能作念好智驾的日子依然触目伤怀。